

技术文章
应用视觉传感器的高精度定位控制
1.前言
近几年,由于中国产业的迅猛发展,包括亚州周边地区在内的产业配置正在逐步发生变化。特别是产品单价较低的商品,及价格竞争较激烈的商品在中国国内生产的比例越来越高了。从行业来说,主要有电子部件,用于电气产品的基板或是FPD(Flat panel display)的生产等。随着生产的开展,对中国国内的生产设备的精度要求越来越高,需要增加伺服控制精度的需要也越来越多了。为达到上述高精度装置的要求,在这里,就使用视觉传感器实现高精度定位控制的案例之一进行一下说明。在这个控制里面使用的机器,从传感器,PLC(Programmable Logic controller),直到伺服控制,都为欧姆龙的商品。用一家公司的产品,就实现了整个系统的控制。
2.控制整体的说明
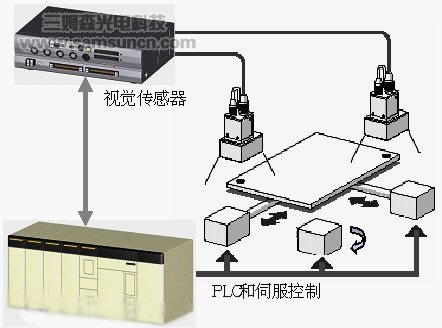
控制的概略构成大致可参考下图,在这里我把整体的控制内容进行一下简单的说明。此为FPD玻璃基板的位置补正案例。作为这个控制的应用,也可以应用于FPD玻璃基板的粘合,电气制品的基板位置补正,电子部件加工时的位置补正等场合。一般,由X轴,Y轴,θ轴的驱动轴构成机械工作台,另有判别其工作台上负载的视觉传感器,进行两者之间的数据演算,再和驱动上述机械工作台的伺服控制构成整个系统。
①对要加工的负载,为了使视觉传感器可以进行判别,需要印刷上标记。如要达到更好的精度,则需要2个以上的标记。
②负载放置在机械工作台上进行加工。
②视觉传感器对上述负载上印刷的标记进行判别,与之前设定好的(记忆住的)位置进行比较后,对误差进行高精度的计算。
③视觉传感器计算出的误差,由PLC换算成机械的移动量,定下补正误差的位置并实行。
3.视觉传感器
在这个控制里面,对提高精度较重要的一点就是视觉传感器的位置判别。如果视觉传感器无法精度较好的判别出位置,此控制里所讲到的提高精度也就无法达到了。我们的视觉传感器,从经验和技术上,对提高判别精度可实现以下的功能。
高精度Search
判别出和所记忆的标记数据最相似的部分,进行高精度的位置数据计算。
在负载上印刷标记时,每次都印刷出同样的标记是比较困难的。会发生印刷的缺陷或是印刷不良等情况。但是,如果使用了此功能,
即使实际负载上所印刷的标签和登录的标签不同,也可以精度较好地进行判别。
ECM(Edge code model)Search
把所记忆的标签边缘(非整个标签,只有四周一圈)作为典型进行登录,从实际接受到的画像数据中找出最相似的部分进行判定。在玻璃互相重叠的情况下,会发生想判别的标签之间也重叠起来的例子。在此功能中,因是以标签边缘数据形式进行典型化登录的,即使发生了标签的重叠化,仍可以判别出四周一圈是何形状,从而达到高精度的判断。
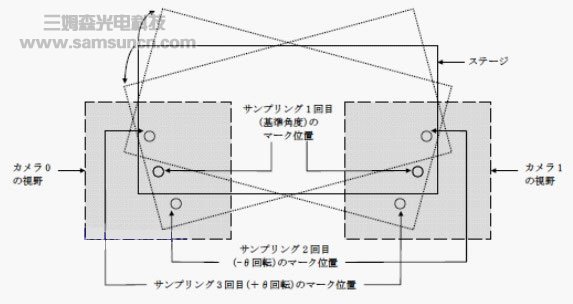
4.校准
视觉传感器中所识别的位置信息,会作为视觉传感器内部的画素数据进行判别。但是,此画素数据和实际的工作台的移动距离关系,如果没有明确,就无法实现负载的位置补正。
所谓校准,就是把视觉传感器所识别到的位置和实际工作台的位置精度的关系明确化,并记住。
我们把这个校准功能放在视觉传感器,PLC,伺服控制的程序上,以自动控制的方式进行实现。
在登录负载的基准位置时,会实施如下所示的动作,最终完成校准。
实际移动负载时,可以通过演算当时的视觉传感器位置信息,达到对下列误差的补正。
摄像机安装误差:当摄像机的安装不是完全的垂直时,可以补正其误差。
机械工作台移动误差:补正由于加工精度而导致的移动量的误差。
机械工作台搭建误差:补正机械工作台驱动轴搭建时的误差。
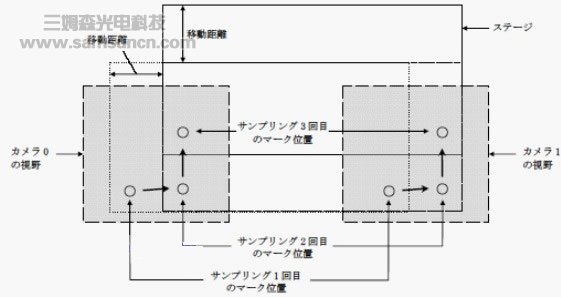
5.移动补正计算
最后,需要用视觉传感器所判别出的位置补正量对工作台进行移动。
需要注意的是,工作台的机构会根据现场案例而不同。
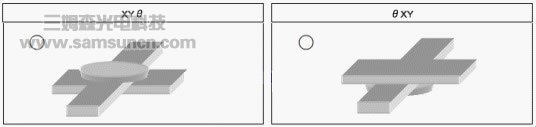
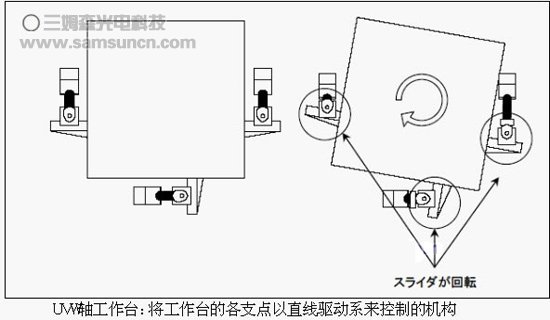
这次所介绍的是针对于如下图的3系统的工作台构成,将其座标变换以PLC和伺服控制来完成。
近几年,FPD行业的玻璃尺寸有变大的趋势,并增加了UVW工作台这样的构成。
UVW工作台,具有最大运动行程较小,旋转角度精度较高的特征。
负载的大小(标记间的长度)变大后,由角度误差而引起的偏移量也会变大,对抑制此种误差是有效果的。
而且,此种工作台的驱动轴是在1个平面上,与以前的XYθ驱动轴层状重叠相比较的话,是较轻薄的机构,具有重量变轻巧的特征。


6.最终实现精度
在实际的案例中,用此种视觉传感器进行高精度定位控制,并实现了定位精度10μm以下的要求。
这个案例的构成机器如下所示。
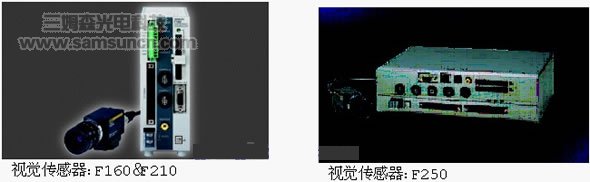
视觉传感器:F210-C10
使用的摄相机:F160-SLC20(视野角20mm)
PLC:CJ1H-CPU66H
串行通信单元:CJ1W-SCU21-V1
定位控制单元:CJ1W-NC433
伺服驱动器:R7D-APA3L(Smart Step)
