

Industry News
3D binocular stereo vision gives robots a pair of eyes
Date:2017-04-07
Source:Samsun Technology
1、应用背景
随着自动化程度越来越高,机器视觉扮演着越来越重要的角色,传统的2D定位无法解决产品的空间坐标信息,而3D双目立体视觉可提供较高精度的定位。在汽车行业,汽车后底板的抓取搬运主要交给工业机器人完成,这面临一大难题:每一块后底板的平面坐标XYR和空间坐标ZWP都相差较大,而机器人夹具的两个尖削必须精确的插入后底板两孔位,才能进行搬运。
3D双目视觉软件系统,该系统搭载两个工业相机,精确的计算出后底板的六个空间坐标XYZWPR,并将坐标发送给机器人,成功为客户解决了这一难题。
2、3D双目立体视觉系统安装及原理
2.1安装方式:
工业相机及光源安装于机器人法兰面两端,如图1。
 图1 相机及光源安装
图1 相机及光源安装
2.2 原理
第一步:通过标定板标定校正,建立图像、相机、机器人三者简的坐标系关系。
 图2 标定校正
图2 标定校正
第二步:对后底板三个不同位置拍照,分别进行特征匹配,通过视差原理计算各匹配特征的坐标XYZ。
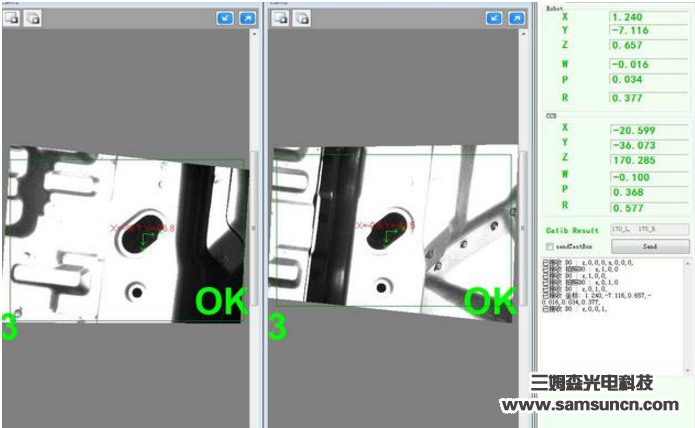 图3 软件界面
图3 软件界面
第三步:根据以上获取的匹配特征坐标,计算得到后底板的空间坐标XYZWPR,如图3右界面显示。
第四步:通过TCP/IP协议,将XYZWPR坐标发送给机器人。
3、前景展望
3D双目立体视觉系统使机器人拥有了一双眼睛,为机器人提供了精确的定位,完成2D定位不能实现的功能,大大提高了生成效率,降低劳动力。并可应用于零件识别、码垛等工业应用,随着工业机器人越来越广泛的应用,3D双目立体视觉将具有更广阔的应用前景。
随着自动化程度越来越高,机器视觉扮演着越来越重要的角色,传统的2D定位无法解决产品的空间坐标信息,而3D双目立体视觉可提供较高精度的定位。在汽车行业,汽车后底板的抓取搬运主要交给工业机器人完成,这面临一大难题:每一块后底板的平面坐标XYR和空间坐标ZWP都相差较大,而机器人夹具的两个尖削必须精确的插入后底板两孔位,才能进行搬运。
3D双目视觉软件系统,该系统搭载两个工业相机,精确的计算出后底板的六个空间坐标XYZWPR,并将坐标发送给机器人,成功为客户解决了这一难题。
2、3D双目立体视觉系统安装及原理
2.1安装方式:
工业相机及光源安装于机器人法兰面两端,如图1。
2.2 原理
第一步:通过标定板标定校正,建立图像、相机、机器人三者简的坐标系关系。
第二步:对后底板三个不同位置拍照,分别进行特征匹配,通过视差原理计算各匹配特征的坐标XYZ。
第三步:根据以上获取的匹配特征坐标,计算得到后底板的空间坐标XYZWPR,如图3右界面显示。
第四步:通过TCP/IP协议,将XYZWPR坐标发送给机器人。
3、前景展望
3D双目立体视觉系统使机器人拥有了一双眼睛,为机器人提供了精确的定位,完成2D定位不能实现的功能,大大提高了生成效率,降低劳动力。并可应用于零件识别、码垛等工业应用,随着工业机器人越来越广泛的应用,3D双目立体视觉将具有更广阔的应用前景。
